
| Kontakt |
| Nasi dostawcy |
| Lista referencyjna |
© NORKOM 2008 |
BY340 i BY641
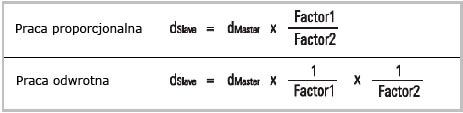
BY340/BY641 są to elektroniczne sterowniki synchronizacji odpowiednie do pracy z wszelkiego rodzaju napędami o regulowanej prędkości, pod warunkiem że dysponują one analogowym wejściem do ustawiania prędkości. Operacje te bazują na zasadzie master/slave. master mógłby być zasadniczo każdą ruchomą częścią maszyny, o ile że występuje sygnał ruchu master z enkodera inkrementarnego. slavem byłby napęd o zmiennej prędkości jak napęd napędzany poprzez falownik lub serwonapęd lub napęd prądu stałego, ale mógłby być również hydraulicznym systemem z serwozaworem lub czymś podobnym. W każdym przypadku niezbędny jest sygnał sprzężenia ze slave. Sterownik synchroniczny otrzymuje wszystkie informacje o pozycji osi master za pomocą enkodera master. Informacja przyrostowa może być skalowana poprzez współczynnik skalujący master (nazwany później jako Factor1). Za pomocą tej informacji sterownik może obliczyć analogowy sygnał wyjściowy prędkości, który jest niezbędny do tego aby oś slave podążała dokładnie za master. ZASADA DZIAŁANIA: Synchronizacja Sprzężenie aktualnej pozycji osi Slave jest realizowane poprzez enkoder slave. Informacja ta korzysta z oddzielnych impulsów skalujących poprzez współczynnik skalowania (nazwany jako Factor2). Pozycja master i slave jest porównywana w sposób ciągły i analogowy sygnał wyjściowy jest uaktualniany odpowiednio w bardzo krótkim cyklu czasu, trwającym zaledwie około 100us. W konsekwencji, obie pozycje mogą być przechowywane wewnątrz komunikatu błędu inkrementarnego (slave może wprowadzać opóźnienie master poprzez kilka enkoderów inkrementarnych, ale nigdy nie straci pozycji). Łatwo idzie zrozumieć, że ten rodzaj pozycjonowania i synchronizacji kątowej zawiera tę samą wolną od błędów synchronizację prędkości master i slave. Kiedy master porusza się do przodu czy do tyłu z dystansem "dmaster", z tym samym dystansem "dslave" będzie się poruszał do przodu i do tyłu slave, w ramach śledzenia impulsów skalujących Factor1 i Factor2. Ogólnie rzec biorąc, współczynnik Factor1 jest parametrem do zmiany współczynnika prędkości, a współczynnik Factor2 jest postrzegany jako stała urządzenia. W większości aplikacji wskazane jest posiadanie proporcjonalnej charakterystyki Factor1, tzn. kiedy chcemy zwiększyć prędkość slave, zwiększamy współczynnik Factor1. Niektóre aplikacje mogą wymagać odwrotnej charakterystyki (np. kiedy używamy urządzenia w tym przypadku do aplikacji urządzenia tnącego obrotowego, gdzie Factor1 jest wykorzystywany do ustawienia długości cięcia). W tym przypadku wyższe ustawienie wymaga niższej prędkości slave, tzn. współczynnik Factor1 musi działać obustronnie. Obie charakterystyki: proporcjonalna i odwrotna może być wybrana poprzez parametr. W zależności od tych ustawień, odległości, a także prędkości podążają za jedną z formuł poniżej:
|