
| Kontakt |
| Nasi dostawcy |
| Lista referencyjna |
© NORKOM 2008 |
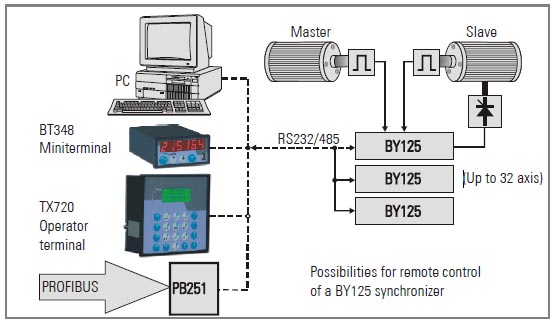
BY125 jest synchronizatorem do wysoko-wydajnych synchronizacji i rejestracji procesu aplikacji pomiędzy dwoma niezależnymi napędami. Urządzenie to jest odpowiednie dla każdego rodzaju napędu (AC, DC, Serwonapęd itp.) które są zmienne pod względem prędkości, pod kontrolą napięcia odniesienia prędkości od 0-10V. 80 kHz zliczanej częstotliwości umożliwia używanie enkoderów o wysokiej rozdzielczości, nawet przy pracy o wysokiej prędkości. Z powodu bardzo krótkiego czasu odpowiedzi 120 us urządzenie to umożliwia odpowiednią synchronizację przy bardzo dynamicznych warunkach z serwonapędami. W kwestii współczynnika pełnej kontroli i innych funkcji jak śledzenie impulsów indeksujących, rejestracji print mark i zdalnej kontroli fazy, są zawarte w szerokim zakresie nastaw standardowych funkcji. Wszystkie ustawienia są w pełni cyfrowe i nie są konieczne żadne potencjometry regulujące. Programowanie parametrów jest realizowane poprzez komputer PC/laptop, za pomocą oprogramowania OS3.x (zawartego na płycie CD wraz z dostawą). Zdalne sterowanie jest możliwe poprzez komunikację szeregową np. przy użyciu jednego z dostępnych terminali TX720 lub BT348. Sterowanie poprzez PROFIBUS jest możliwe z użyciem jednostki PB251. Konstrukcja mechaniczna o budowie 19" stalowej kasety ze wszystkimi wyprowadzeniami na stronie przedniej. Zastosowanie obudowy SM150 (opcja patrz akcesoria) umożliwia również łatwy montaż na szynie DIN. BY125 pracuje z niestabilizowanym napięciem zasilania 24 VDC (18V...30V).
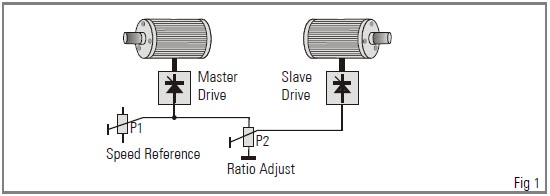
ZASADA DZIAŁANIA: Wszystkie operacje bazują na ustawieniu "analogowej synchronizacji" pomiędzy napędami. Zostaje to osiągnięte za pomocą zasilenia napięciem odniesienia wspólnej prędkości do napędu i strojenie prędkości napędu w celu wprowadzenia ich do przybliżonej synchronizacji. Współczynnik adaptacji może być niezbędny dla napędu slave jak pokazano na rysunku poniżej. Ta wstępna, analogowa synchronizacja może łączyć dwie prędkości z błędem rzędu 1%.
Cyfrowa synchronizacja musi teraz kompensować na analogowe błędy prędkość, aby otrzymać bezwzględną, kątową synchronizację oraz synchronizację pozycji bez przemieszczeń i bez kumulacyjnego przemieszczenia i przesunięcia osi napędu. To wymaga cyfrowego sprzężenia zwrotnego - pozycji kątowej osi napędu. Zazwyczaj używane są enkoder inkrementarny wału lub równoważne sygnały (np. symulacja enkodera z resolvera systemu). Synchronizator sprawdza w sposób ciągły dwie pozycje wału i natychmiast odpowiada poprzez analogowy sygnał korekty, kiedy błąd kątowy zaczyna się pojawiać. Ta analogowa korekta, która dodała do slave'a odwołanie z prawidłową polaryzacją, będzie w ten sposób trzymać pozycję wału Master i slave w linii. Jako że synchronizator odpowiada w mikrosekundy na każdy indywidualny impuls enkodera, slave nie będzie praktycznie miał szans na jakiekolwiek odchylenie.
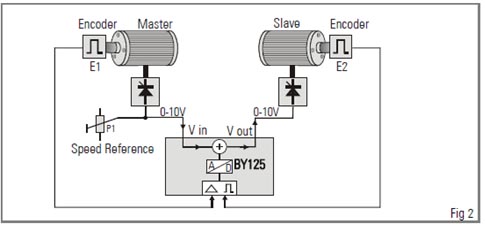
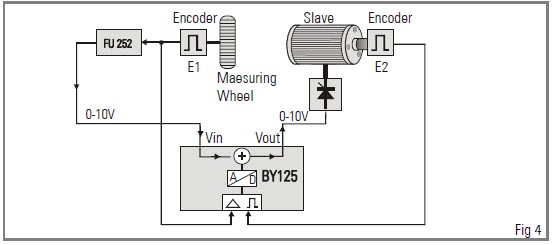
Rysunek 2 pokazuje że sygnał "Vin" jest niezbędny do pracy napędu i korekta napięcia jest dodawana do otrzymania całkowitej prędkości referencyjnej "Vout". Łatwo jest zrozumieć, że sygnał zasilający musi być proporcjonalny do prędkości master. Istnieją trzy drogi do generacji sygnału Vin: 1.Zastosowanie napięcia odniesienia prędkości master, co obrazuje rysunek 2. Zakłada to że napęd master nie używa żadnych nadzwyczajnych wewnętrznych nachyleń ponieważ w przeciwnym razie Vin nie mógłby reprezentować rzeczywistej prędkości master na przyspieszenie lub spowolnienie. Jako procedura końcowa a) musi być użyta jedynie, kiedy prędkość odniesienia master właśnie zawiera nachylenie (generowane poprzez wyjście PLC itd.) i kiedy nachylenie wewnętrzne napędu jest ustawione na zero, lub swoją minimalną wartość. Natomiast rzeczywisty sygnał analogowy prędkości z generatora tacho może być wykorzystany w każdej chwili. 2. Użycie konwertera częstotliwość - napięcie zainstalowanego w jednostce BY125. Procedura ta może być zastosowana w większości aplikacjach.
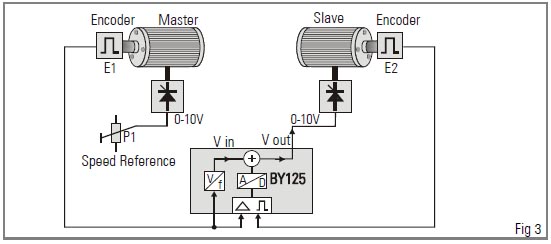
Sygnał Vin jest teraz generowany wewnętrznie z częstotliwości enkodera master i napięcie zewnętrzne nie musi być stosowane do wejścia analogowego. Umożliwia to napędowi master użycie wewnętrznych nachyleń, ponieważ częstotliwość enkodera zawsze reprezentuje rzeczywistą, aktualną prędkość master. 3. Użycie zewnętrznego konwertera napięcie - częstotliwość. Procedura ta jest stosowana tylko w wyjątkowych przypadkach.
Przy użyciu bardzo szybkiego i precyzyjnego konwertera typu FU252, także ekstremalnie niskie częstotliwości master będą przyjmowane bez problemu. |